Boat Controller
Control system for small USVs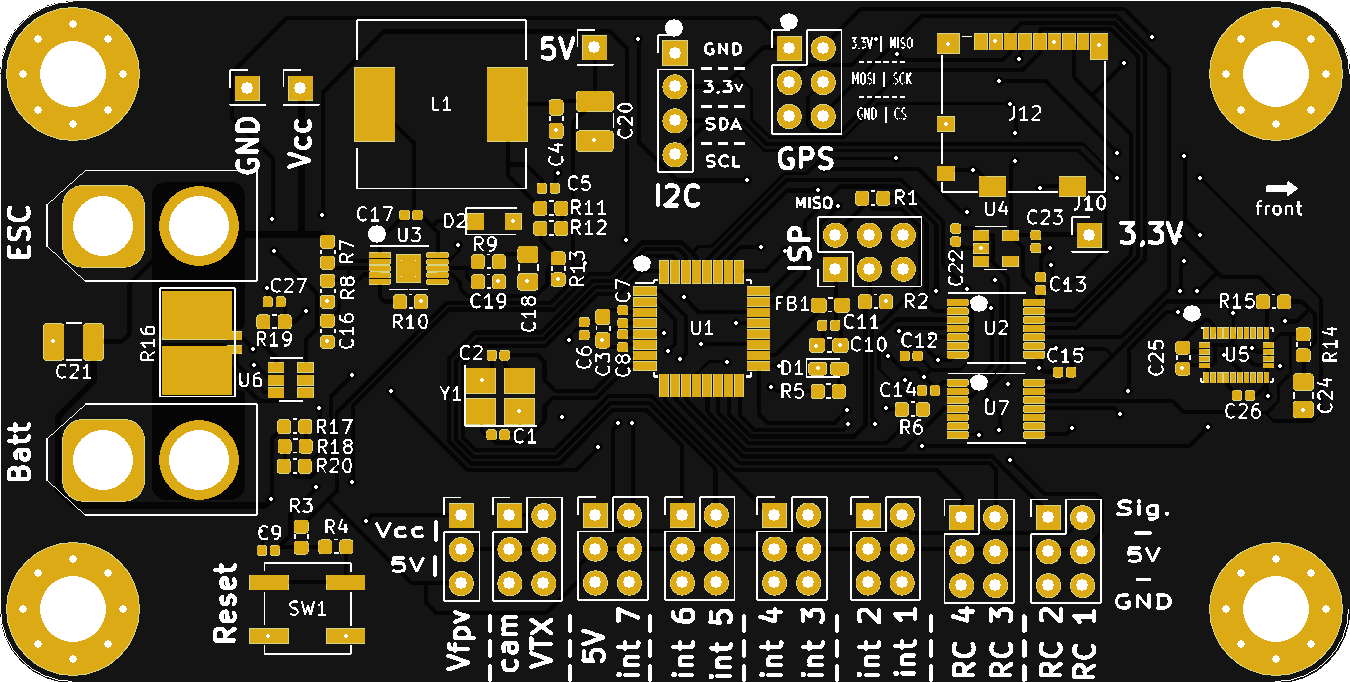
This Project provides drive-by-wire and autonavigational abileties in an affordable and easy to implement way while allowing an user to record the performance of an unmanned surface vehule.
- GPS
- INS
- blackbox sd card system
- internal power source and BMS